Well that escalated quickly!
Solche Aussagen sind normalerweise per Bild zu veranschaulichen

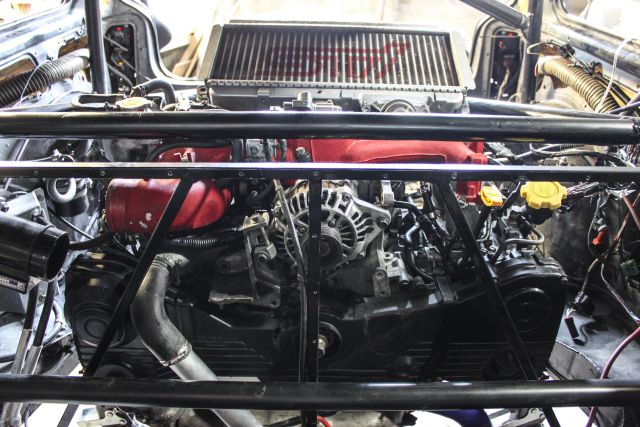
Zum Motor kann ich bereits weitere Details veröffentlichen da ich die originale Motorsteuerung nicht verwenden möchte. Der Aufwand die Elektronik von Subaru auf den Corsa anzupassen ist unverhältnissmässig gross und eine Anpassung des Steuergerätes schlägt mit weiteren Kosten zu Buche sollte etwas angepasst werden.
Somit werde ich mich mit dem Freiprogrammierbaren KMS einmal mehr auseinandersetzen um den Motor zum laufen zu bringen. Dies wird sicherlich den Verkabelungsaufwand kleiner halten anstatt den gesamten Subaru Kabelbaum von unnötigem zu befreien.
Einige Systeme oder Bauteile werden wegfallen oder angepasst werden.
- Drehzahlsensor
Der Ej20 v7 Motor verwendet einen Drehzahlgeber (36-2-2-2) spezifisch für das Subaru Steuergerät welches sich glücklicherweise simpel abändern lässt um eine Verzahnung zu erstellen (36-2) mit welcher das KMS etwas anfangen kann. Dazu können die fehlenden Zähne am Kurbelwellenrad per Schleifwerkzeug erstellt werden.
- ACVS (Nockenwellenverstellung)
Die Einlassnockenwellen sind ab dieser Motorversion des EJ20 variabel, da diese Verstellung aber nur im im Teillastbereich und bis ca. 4000rpm bei Vollast aktiv ist, wird dieses System zwar physisch erhalten beiben jedoch nicht mehr angesteuert. Im Vollastbereich von 4000-8000rpm ist dieses System nicht aktiv. (Ja der Motor dreht original bis 8000rpm

)
- Fuel Cut
Um zu verhindern dass zuviel Ladedruck gefahren wird, ist im Steuergerät die Funktion des "Fuel Cut" einprogrammiert welcher die Einspritzung abstellt sobald zuviel Boost erkannt wird. Dies kann per Programmierung oder weiterem Bauteil umgangen oder angepasst werden. Das Freiprogrammierbare Steuegrät macht dies überflüssig.
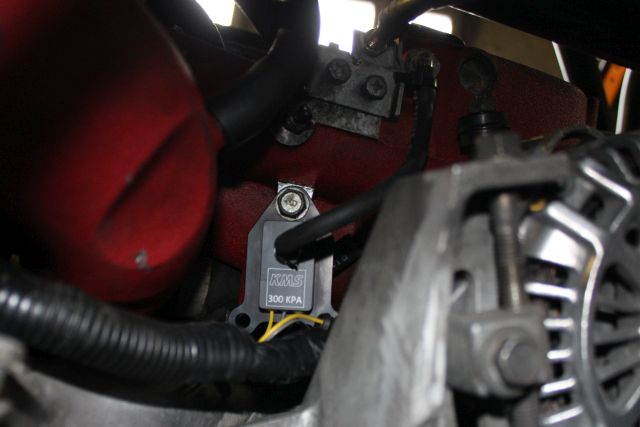
- Boostcontroller und MAP Sensor
Leider findet sich sehr wenig Informationen zu den technischen Details zu einzelen Subaru Bauteilen, womit es nötig wird bereits vorhandene Sensoren und Aktoren durch KMS Teile zu ersetzen um das System korrekt abzustimmen.
- Diverses
Weitere Bauteile die nicht mehr benötigt werden sind: Klopfsensor, Nockenwellenpositionsensor, Tankentlüftungsventil Leerlaufsteller und zweite Lambdasonde
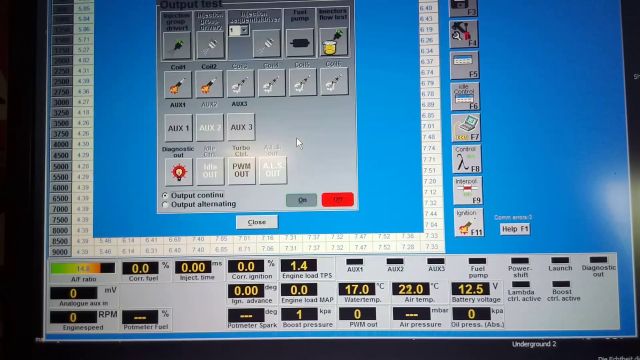
Somit wird das nötigste betrieben um das Aggregat zu betreiben. Die Vorbereitungen dafür sind bereits angelaufen um den Kabelbaum zu erstellen und ein Grundmapping für den späteren Betrieb habe ich auch bereits erstellt.
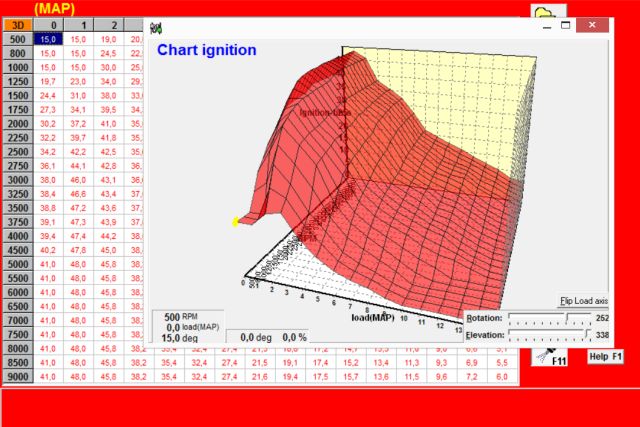

was dies genau beinhaltete werde ich Kund tun sobald die Zeit reif ist.
Soll also fertig werden.